
Governing Black-Box Agents in Competitive Multi-Agent Systems
Existing solutions for this task mostly assume specific knowledge about agent preferences, utilities and strategies, neglecting the fact that actions are not always directly linked to genuine agent preferences, but can also reflect anticipated competitor behavior, be a concession to a superior adversary or simply be intended to mislead other agents. This assumption both reduces applicability to real-world systems and opens room for manipulation.
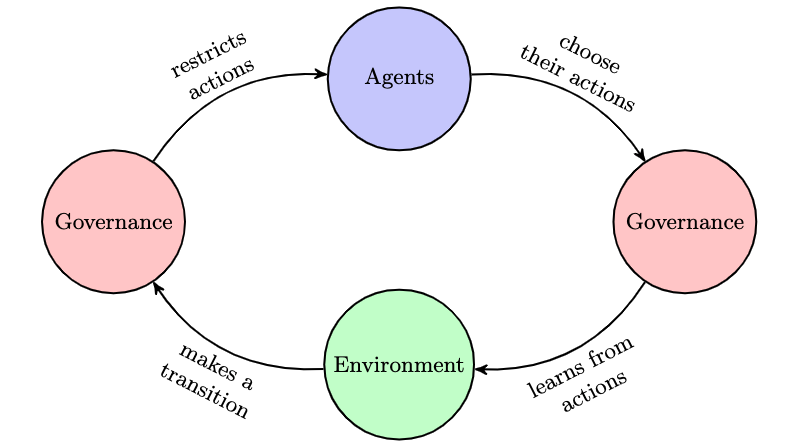
We therefore propose a new governance approach for competitive MAS which relies exclusively on publicly observable actions and transitions, and uses the acquired knowledge to purposefully restrict action spaces, thereby achieving the system’s objectives while preserving a high level of autonomy for the agents.